|
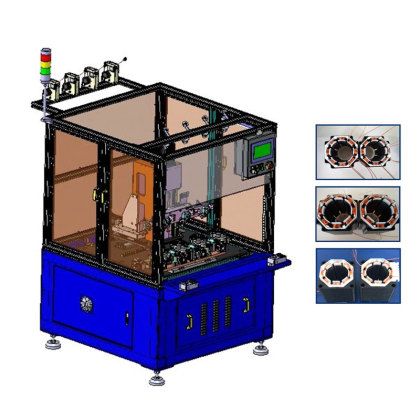
厂家才知道的绕线机原理内绕机是一种用于绕制线圈、线束等内部环形结构的设备,其控制原理通常涉及以下几个方面:
运动控制:内绕机的绕线工具和工作台需要按照设定的路径和方式进行运动。通过编程控制,确定绕线工具的轨迹、角度和速度,使其能够按照预定的要求进行绕线操作。 |

|
厂家才知道的绕线机原理内绕机是一种用于绕制线圈、线束等内部环形结构的设备,其控制原理通常涉及以下几个方面:
运动控制:内绕机的绕线工具和工作台需要按照设定的路径和方式进行运动。通过编程控制,确定绕线工具的轨迹、角度和速度,使其能够按照预定的要求进行绕线操作。 |